
Every year, Festo comes up with innovative and fantastical new robot designsas part of its "Bionic Learning Network," which seeks to use "principles from nature to provide inspiration for technical applications." In practice, this means developing all kinds of spectacular robotic animals, including thisabsolutely amazing flying seagull.
Festo's Newest Robot Is a Hopping Bionic Kangaroo

Photo: Festo
Every year, Festo comes up with innovative and fantastical new robot designsas part of its "Bionic Learning Network," which seeks to use "principles from nature to provide inspiration for technical applications." In practice, this means developing all kinds of spectacular robotic animals, including thisabsolutely amazing flying seagull.
For the last few years, Festo has been secretly working in their sprawling German laboratory lair on their most ambitious bioinspired robot yet: an unstoppable (we assume) hopping robotic kangaroo.
BionicKangaroo is able to realistically emulate the jumping behavior of real kangaroos, which means that it can efficiently recover energy from one jump to help it make another jump. Without this capability, kangaroos (real ones) would get very very tired very very quickly, but by using their tendons like elastic springs, the animals can bound at high speeds efficiently for substantial periods of time.
BionicKangaroo emulates this with an actual elastic spring, which partially "charges" the legs on landing. The entire robotic animal weighs just 7 kilograms and stands a meter high, but it can jump 0.4 meter vertically and 0.8 meters horizontally, which is fairly impressive.

Of course, an internal power source is necessary as well, and BionicKangaroo relies on either a small compressor or a storage tank to provide high pressure air for the pneumatic muscles that power the jumping. Lightweight batteries drive everything, and a sophisticated kinematic control system keep the robot from toppling over. Control, as you might have noticed in the video, is gesture-based, via a Thalmic Labs Myo armband.
Festo sent us a neat graphic of how everything is laid out, along with a step-by-step description of the jump sequence:

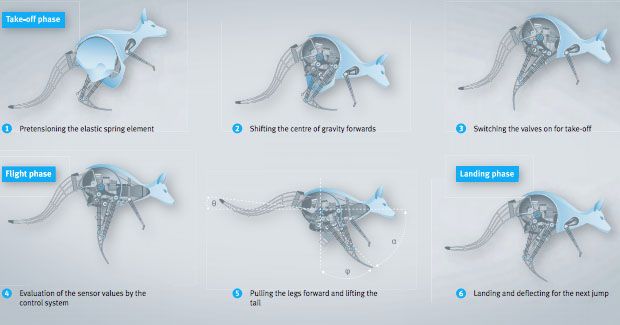
The take-off and flight phaseBefore the first jump, the elastic tendon is pneumatically pre-tensioned. The BionicKangaroo shifts its centre of gravity forwards and starts to tilt. As soon as a defined angle is reached at a corresponding angular velocity, the pneumatic cylinders are activated, the energy from the tendon is released and the kangaroo takes off.In order to jump as far as possible, the kangaroo pulls its legs forward during the flight phase. This creates torque at the hip, for which the artificial animal compensates with a movement of its tail. The top of the body thereby stays almost horizontal.The landing phase: energy for the next jumpUpon landing, the tendon is tensioned again, thus converting the kinetic energy of the previous jump to potential energy. The energy is thereby stored in the system and can be called on for the second jump. The landing phase is the critical process for recovering the energy and is responsible for the kangaroo’s efficient jumping behaviour. During this phase the tail moves towards the ground and thus back to its starting position.Reduced energy consumption in the following jumpsIf the kangaroo continues jumping, it channels the stored energy directly into the next jump. The potential energy from the elastic tendon is used again at this point. The valves switch at the right moment and the next jump begins. In this way it takes several jumps one after the other.If the BionicKangaroo is supposed to come to a standstill, it must absorb as much energy as possible. To do so, the pneumatic actuators are switched accordingly and the tendon is actively tensioned again.
As far as we know, Festo is not intending to unleash an invasion of robotic kangaroos (as fantastic as that would be). Rather, they're exploring ways of intelligently recovering energy in industrial automation, and combining electronics with pneumatics in new ways.

At this point, we're scientifically obligated to point out that it might be more accurate to call this robot a wallaby rather than a kangaroo. Both wallabies and kangaroos are members of the same family (Macropodidae), but the generally accepted differentiator between the two is that wallabies are, well, smaller. And that's about it. So considering that this little fellow is on the diminutive side (at least, compared to a kangaroo, which can kick you in the face), we're going to suggest to Festo that BionicWallaby might be a bit more accurate.
The new robot will be officially unveiled next week at Hannover Messe.








No comments:
Post a Comment